シングルビーム搭載 調査用無人リモコンボート

商品の特長
入力された特定の位置を自律航行しながら、水底に音波を発信し水深の測深とGPSで位置を計測しながら水底の情報を収集する無人ボート。
リモコンボートで収集された情報を処理して、水底の形状を立体に地図化出来るようになりました。

取得CSVデータ
X,Y,水深,緯度,経度,GPS日時等
自動回帰
基地局との通信が連続して30秒以上途絶えた場合、またはボートの
バッテリー残量が20%以下となった場合はボートの電源を入れた地点へ自動で戻ります。
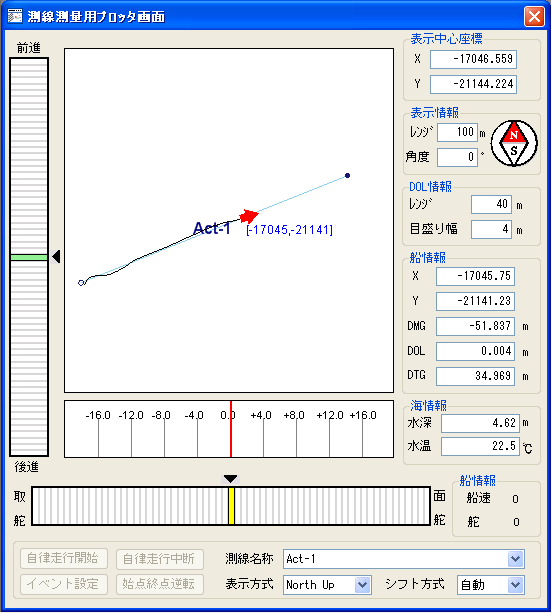
自律測線走行
・XYまたは緯度経度で入力した測線上をボートが自動で走行。
・側線は1プロジェクト最大128本入力が可能。
・高性能自律制御プログラム採用により側線から0.5m以内で自律走行。
目的地走行
・緯度経度で入力した目的地へボートが自動で走行。
・目的地は1プロジェクト最大255カ所が入力が可能。
河川
概要ムービー
- 河川定期横断測量によって河床の地形変動を把握します。
- 河川内及び周辺の環境を把握します。
- 河道の浚渫施工等による環境モニタリング調査を行います。
ダム貯水池(湖沼)

- 堆砂測量によって湖底へ蓄積される堆砂量を把握できます。
- 湖内の水質や生態系を把握、管理します。(採水、捕獲)
- 湖岸水際の植生について把握します。(カメラ観察等)
- 湖底の動植物について生息状況を把握します。(カメラ観察等)
- 農業利用を目的とした水路等の現況調査。(簡易地形計測)
湾岸・港湾

- 護岸工事の矢板打込等のBefore、Afterを検証します。
- 海岸侵食や河川からの土砂供給状況を把握します。
- 海岸周辺環境(水質、生態系など)を把握します。
- 港湾内の地形変化や水質環境を把握します。
- 護岸や養浜施工等による環境モニタリング調査を行います。
- 港湾構造物の水中や水面上の現況を把握します。
応用例



関連ソフトウェア
|
測線長さ変更簡易ソフト
|
測線長さ変更簡易ソフトを無料ダウンロード (excel) |

カタログ
GPS・ソナー搭載自律航行リモコンボート : 比較
| ボート本体 | RC-S2 (終売) 下記参考データとして |
RC-S3 |
|---|---|---|
| 全長 | 1,060mm | 1,200mm |
| 幅 | 270mm | 350mm |
| 高さ | 250mm(アンテナ部除く) | 250mm(アンテナ部除く) |
| 重量 | 9.3Kg(バッテリー搭載時:13Kg) | 13Kg(バッテリー搭載時:16Kg) |
| 駆動系 | ||
| モーター | 直流ブラシモーター2個搭載 | 直流ブラシレスモーター2個搭載 |
| 最大船速 | 2.8kt. | 4.5kt. |
| 電源 | ニッケル水素充電池 10Ah×2 | リチウムイオン充電池 20Ah×2 |
| 連続航行時間 | 120分(静水、自律航行時) | 210分(静水、自律航行時) |
| 自律航行 | ||
| 船速 | 2.0kt.(対水速度 2.8kt.) | 2.0kt.(対水速度 4.5kt.) |
| 測線航行 | 1プロジェクト 最大128本登録可能 | 1プロジェクト 最大128本登録可能 (高性能自律制御プログラム) |
| 目的地航行 | 1プロジェクト 最大255ヶ所登録可能 | 1プロジェクト 最大255ヶ所登録可能 |
| 音響測深機 | ||
| 送信周波数 | 200KHz | 200KHz |
| 測深範囲 | 0.5m~80m | 0.5m~80m |
| 測深分解能 | 0.01m | 0.01m |
| ゲインコントロール | 手動(H、L 各20レベル)、自動 | 手動(H、L 各20レベル)、自動 |
| 指向角 | 6°(半舷半角3°)、 24°(半舷半角12°) |
6°(半舷半角3°) |
| GPS | ||
| 位置精度 | SBAS(0.5m以内) | SBAS(0.5m以内) ネットワーク型RTK-GNSS(JENOBA方式)(0.04m以内)オプション |
| 通信 | ||
| 方式 | 2.4GHz 無線LAN | 2.4GHz 無線LAN |
| データ取得可能範囲 | 500m | 800m |
| データ取得間隔 | 1回/1秒 | 1回/1秒 |
| 特許 | ||
| 特許 | 特許第3939710号 特許第4404943号 |
|